V minulém díle jsem zmiňoval řídicí jednotku a požadavky na ni kladené, které považuji za důležité. V diskuzi pod článkem bylo možné vidět kvalitní názory ohledně dalších alternativ a musím říci, že zejména jedna řídicí jednotka mě velice zaujala, a proto jí ještě doplním tento díl, který bude o dalších komponentách kvadrokoptéry.
Flip32+ je deska s 32bitovým mikropočítačem o frekvenci 72 MHz a podporuje ji CleanFlight, 32bitová variant známého MultiWii. Obsahuje všechny věci, které budeme pro řízení kvadrokoptéry potřebovat, a oproti desce zmíněné v minulém díle není ani dražší.

Řídicí jednotka Flip32+

Porovnání velikosti s mincí
Pokud chcete snížit náklady stavby kvadrokoptéry na minimum, je pravděpodobné, že zabrouzdáte na web HobbyKing.com a budete vybírat mezi tamními komponentami. Ačkoliv je jejich zboží původem z Číny, některé se může bez obav vyplatit – např. elektronika, rámy atp. O jejich motorech značky Turnigy a NTM se však tvrdí, že mají nekvalitní ložiska, která se brzy opotřebují, a motory pak nadměrně hrčí a vibrují.
Mám pro vás proto tip na celou sadu motorů, regulátorů a vrtulí, kterou nejen že pořídíte za stejnou ceny jako její ekvivalenty v HobbyKingu, ale jsou to zároveň komponenty kvalitní a hojně rozšířené. Jedná se o sadu DJI e300 Propulsion Set a sám jsem ji při stavbě kvadrokoptéry použil.

DJI e300 Propulsion System

DJI e300 Propulsion System
Můžete ji koupit jako komplet s rámem DJI, což doporučuji v případě, že hodláte použít řídicí jednotku s nějakým rozšířeným firmware a nebudete tak trávit čas testováním:
Pokud však plánujete úpravu řídicího software, což se pravděpodobně neobejde bez testování,doporučuji použít rám, který dokáže alespoň částečně ochránit vrtule a motory. Jestliže vám kvadrokoptéra bude padat na zem, může při tom dojít ktomu, že točící se vrtule zavadí o překážku. To povede v lepším případě k jejímu poškození, v tom horším si možná poškodíte i motory, což bude mít negativní dopad na schopnost stabilizace kvadrokoptéry. Vrtule se poškodí (nalomí, otluče) snadno a kupovat nové není vůbec levná záležitost.
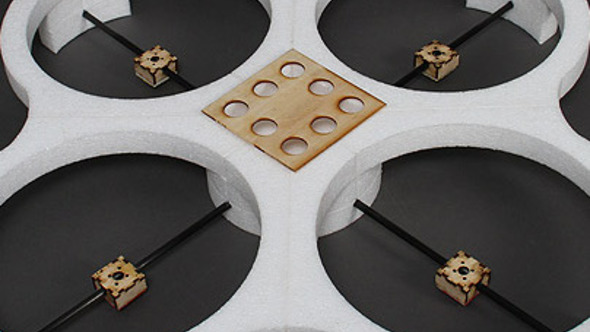
Ve své kvadrokoptéře jsem použil rám z EPP, což je materiál podobný polystyrenu, jen je pevnější. Má taky tu výhodu, že EPP poměrně dobře tlumí vibrace z motorů, což sníží zkreslení výstupu z IMU. Musím jen upozornit, že motory jsou v něm umístěny k sobě poněkud blíže.

Rám z EPP

Jednotlivé části rámu
Když máme vybraný rám a pohon, zbývá nám vyřešit akumulátor a napájení. Nejpoužívanější akumulátory v kvadrokoptérách jsou LiPo (lithium-polymer), kde jeden jeho článek má nominální napětí 3,7 V. Pokud koupíme LiPo s označení 3S, znamená to, že má v sérii zapojené tři články a celkové nominální napětí má 11,1 V. U regulátorů otáček a motorů bývá označeno, pro kolik článků LiPo zapojených do série jsou stavěné. Sada DJI e300 je pro LiPo 3S a 4S.
Nevím jak pro vás, ale pro mě je prioritou, aby se s kvadrokoptérou dalo na jedno nabití létat co nejdéle. K tomu je nutné použít akumulátor s dostatečně velkou kapacitou. S rostoucí kapacitou akumulátoru však roste hmotnost kvadrokoptéry.
Tah vyvíjený pohonem je dán otáčkami motorů a charakteristikou vrtule. Maximální otáčky motorů jsou dány napětím akumulátoru. Motory DJI e300 mají označení 920KV, což znamená 920 rpm/V.
Pokud tedy potřebujete zvětšit tah pohonu, aby se kvadrokoptéra s těžkým akumulátorem vznesla a dalo se s ní manévrovat, máte dvě možnosti: použít větší vrtule, zvětšit jejich úhel náběhu, zvětšit voltáž akumulátoru, nebo použít motory s větším KV. Musíte si jen dávat pozor, abyste nepřekročili maximální proud, který snesou ESC, motory a akumulátor. Ten samozřejmě stoupá s rostoucím výkonem pohonu, popřípadě klesne zvolíte-li akumulátor s větší voltáží (P = U×I).
Doporučuje se, aby hmotnost kvadrokoptéry byla cca poloviční vzhledem k maximálnímu tahu kvadrokoptéry. Použijete-li set DJI e300 a LiPo 3S, výrobce uvádí doporučené zatížení 300 g na jeden motor a maximální tah 600 g. (Na jeden motor proto, že tento set se montuje také do hexakoptér.)
V mé kvadrokoptéře, která váží 930 g bez akumulátoru, jsem použil Zippy LiPo 3S 8000mAh (650 g), který sice markantně prodloužil dobu letu, ale manévrovatelnost byla dost na hraně. Lepší dojem jsem měl s akumulátorem LiPo 4S 4000mAh, nicméně vzhledem k předimenzovanému výkonu, který poskytl, bych zkusil použít 4S s ještě vyšší kapacitou, čímž by se kvadrokoptéra trochu víc zatížila a stoupla by doba letu. Upozorňuji, že mým cílem bylo čas letu co nejvíce prodloužit pro účely testování a kvadrokoptéru jsem nepoužíval k akrobacii.
Mezi tím, jaké použijete motory, ESC, vrtule, akumulátor a hmotnost rámu, existuje optimum, které vám může orientačně pomoci najít kalkulátor, který je hojně rozšířen mezi modeláři. Bohužel, v neplacené verzi neobsahuje mnoho prodávaných komponent, a tak je potřeba trochu improvizovat.
Co se týče napájení řídicí jednotky, to je řešené ESC regulátory, které mají výstup na 5 V a v podstatě se o to nemusíte starat. Pokud však použijete i Raspberry Pi, které je choulostivé na výkyvy napětí a rušení, není jeho napájení z ESC příliš vhodné.
Další díl bude o PID regulátoru a jeho implementaci do řídicí jednotky.




































 ČLÁNKY DO MAILU
ČLÁNKY DO MAILU